Most data center monitoring runs on sequential execution only. The parallel compute is already there, waiting. GreenM3DC is not about adding parallel — it is about achieving the right balance between the two.
In the last post, Gary Starkweather replaced white light with a laser. But he did not throw away his eyes. Incoherent light is how you see the room. Coherent light is how you write precisely onto a surface. You need both. The question is what each one is for.
The same duality runs through how a data center computes.
Two kinds of work
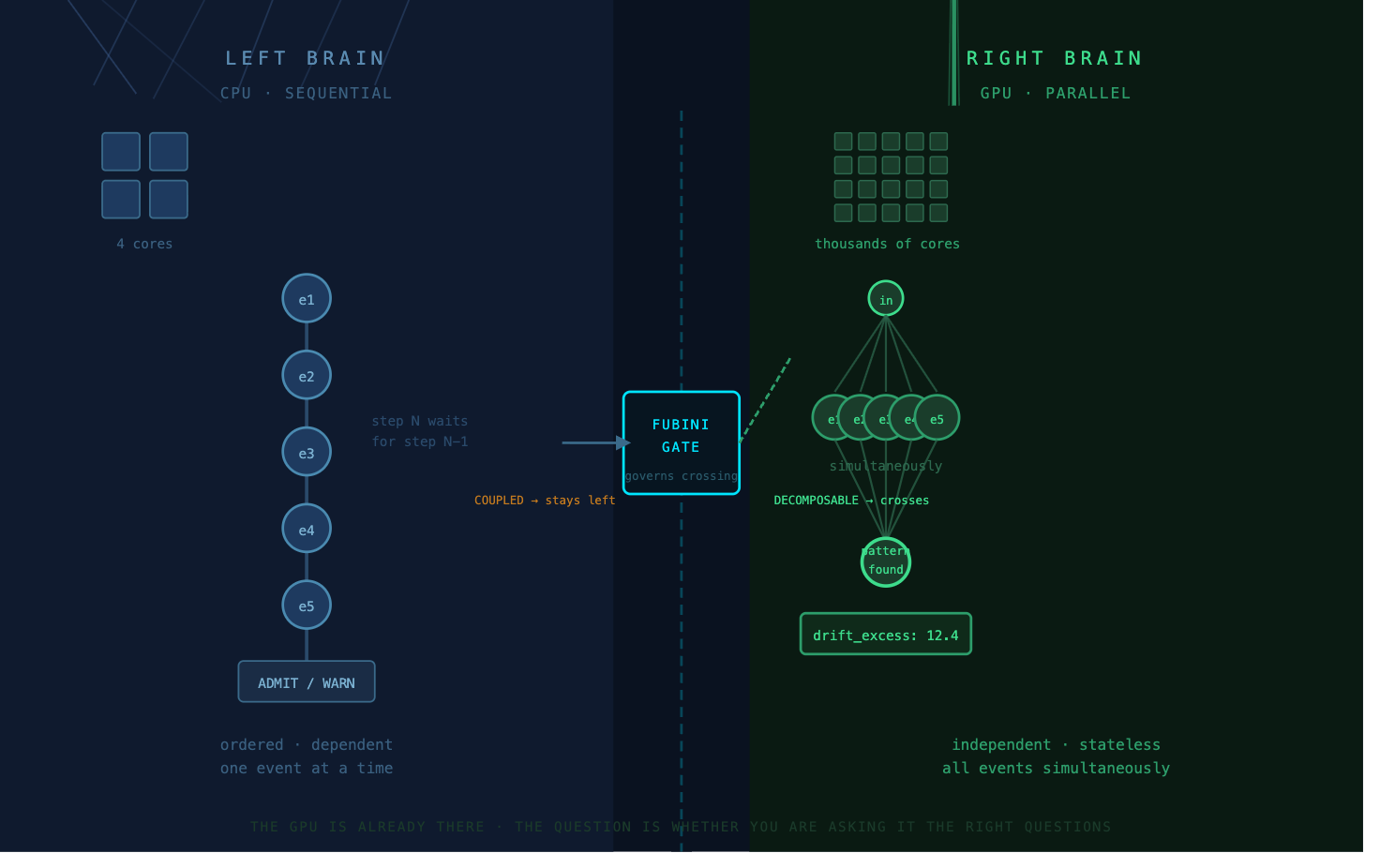
Sequential work is dependent. Step N cannot execute before step N-1 completes. A gate decision that requires the previous verdict. A threshold check against a current reading. This work belongs on a CPU — ordered, control-flow-heavy, low-latency.
Parallel work is independent. Element i's computation does not depend on element j's result. Evaluating divergence across thousands of sensor events. Detecting whether a morphism has been silent across a window of data. Each event can be evaluated without knowing what any other event produced. This work belongs on a GPU — unordered, high-throughput, data-flow-heavy.
Most monitoring systems treat all work as sequential. Every alarm threshold checked in a loop. The GPU is sitting there. It is not being asked.
The mistake is not using the wrong tool. It is not using both.
A CPU running parallel-eligible work produces correct results — slowly, leaving capability on the table.
A GPU running sequential-dependent work is worse than slow. Dependent computation on a parallel executor produces incorrect results silently. No alarm fires. The error is structural.
This is why the balance cannot be assumed. It must be governed.
GreenM3DC: both in balance
The compile loop — gate decisions, sequential verdicts — runs on the CPU. Dependent work. Each step requires the last.
The drift integral — detecting morphism silence across thousands of events — runs on the GPU. Each divergence calculation is independent. Embarrassingly parallel. The GPU processes the full window simultaneously; the CPU collects the result into a single structural finding: drift_excess, confidence class, morphism pairs in native units.
Neither replaces the other. The CPU asks: did this event pass the gate? The GPU asks: has this morphism been silent for six hours while the system continued to produce readings?
Different questions. Different execution. Running both correctly is what makes the full picture available.
The bridge between them has one rule: coupled computation cannot cross to the parallel side. If elements depend on each other, they stay on the CPU. The Fubini gate governs the crossing. Getting the boundary right is not a performance optimization — it is the architectural condition for both sides working correctly.
Starkweather needed coherent light to write precisely. He needed incoherent light to see the room. The insight was not to replace one with the other. It was to know which one to use, and when.
The GPU is already there. The question is whether you are asking it the right questions.
GreenM3DC is operational against the synthetic pilot dataset.
Production scoring requires real-sensor intake and an admitted baseline.
— Dave / greenm3